
Design and Implementation of Obstacle Avoiding Line Follower Robot
Abstract
Abstract
Design and Implementation of Obstacle Avoiding
Line Follower Robot
Aim
Design and Implementation of Obstacle Avoiding Line Follower Robot
Introduction
Line follower is one kind of autonomous robot which follows a line until that line exists. Generally, the line is drawn on the floor . It can be either black or white. The line can also be normal visible or invisible magnetic field or electric field. The robot follows the line by using Infra-Red sensors. There are two sensor, these sensors then read the line and send that reading to Arduino and then control the movement.
Avoiding obstacles is a key job in robotics, where autonomous robots aim to reach their destination without bumping into things. One type of autonomous robot that's pretty clever is the real-time Arduino obstacle avoiding bot. It can spot obstacles and figure out new paths to move without running into them.
PID Algorithm
PID stands for Proportional, Integral and Derivative control. This is a control system algorithm. It is basically a feedback mechanism which can predict error by comparing an output variable with a reference value and apply a correction based on proportional, integral and derivative terms. The algorithm aims to predict and minimise error in an output variable.
The PID control system can be used for a line follower as well. The typical line followers have jerky movement due to sudden nature of line detection and path correction. By applying PID control algorithm, the line follower can be made to move smoothly along the line. This also allows the line follower to move faster and follow its path with much pace.
Block Diagram of the Project
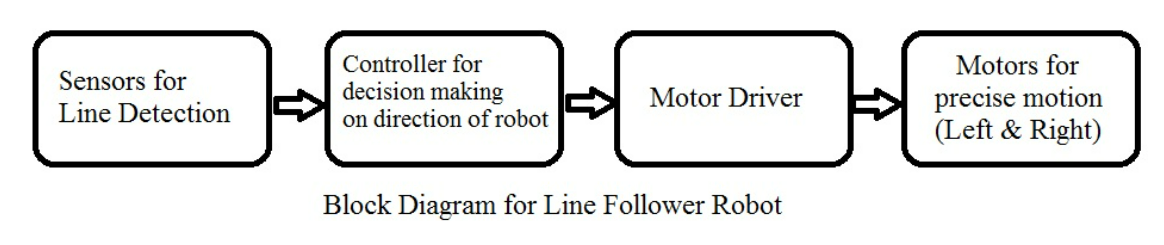
Block Diagram Description :
Sensors (IR Sensor): We have used IR Sensor Module as the line detecting sensor for the project. It consists of an IR LED and a Photo diode and some other components like comparator, LED etc.
Controller (Arduino UNO): Arduino UNO is the main controller in the project. The data from the sensors (IR Sensors) will be given to Arduino and it gives corresponding signals to the Motor Driver IC
Motor Driver (L298N): L298N Motor Driver IC is used in this project to drive the motors of the robot. It receives signals from Arduino based on the information from the IR Sensors.
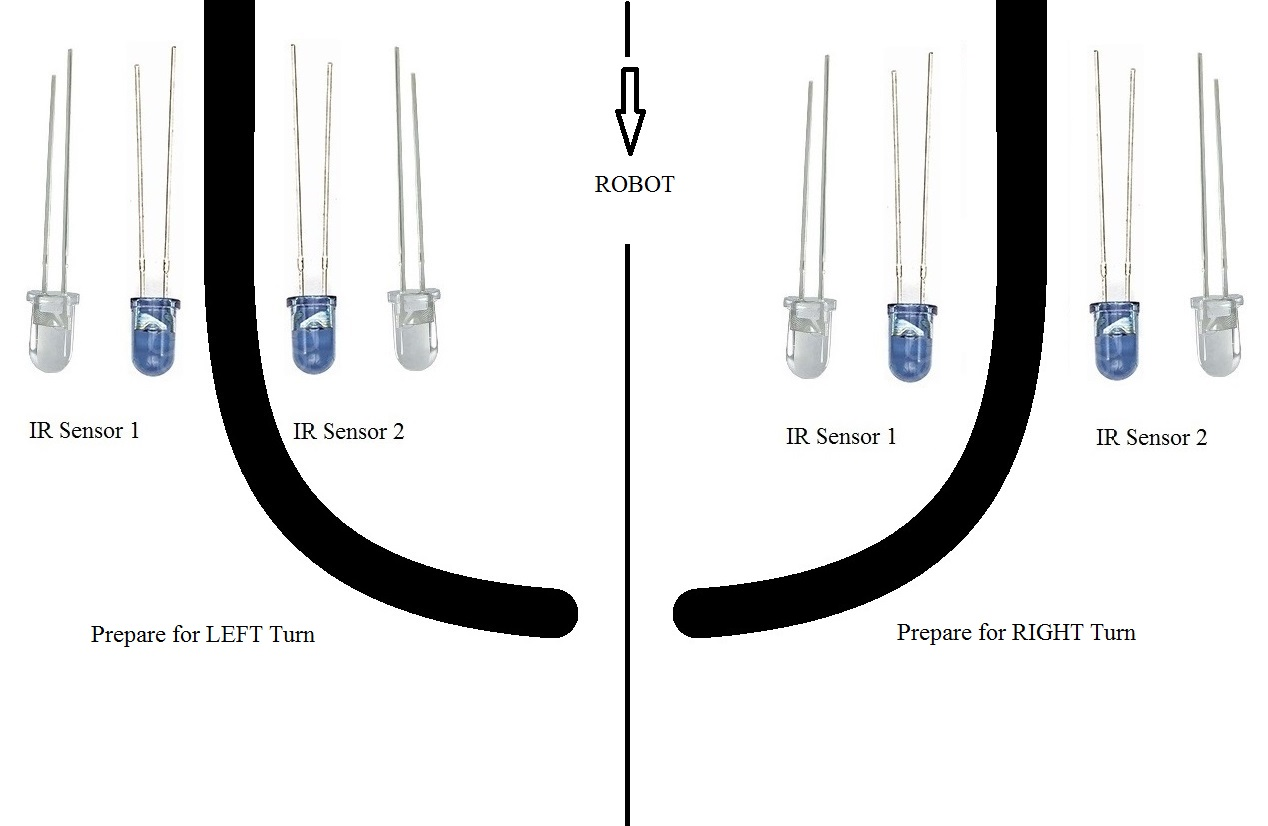
Working of Line Follower Robot
The Line Follower Robot detects the black line on the surface and moves along the line.
For the line detection logic, we used two IR Sensors, which consists of IR LED and Photodiode. They are placed in a reflective way i.e. side – by – side so that whenever they come in to proximity of a reflective surface, the light emitted by IR LED will be detected by Photo diode.
The black surface absorbs majority of the light and the light doesn’t reach the photodiode, whereas the background reflects majority of the light, this error is used to detect the path.
Using the same principle, we will setup the IR Sensors on the Line Follower Robot such that the two IR Sensors are on the either side of the black line on the floor. When the robot moves forward, both the sensors wait for the line to be detected. If one of the sensors detects a black line and other doesn’t, it means that there is a turn ahead. Arduino UNO detects this change and sends signal to motor driver accordingly.
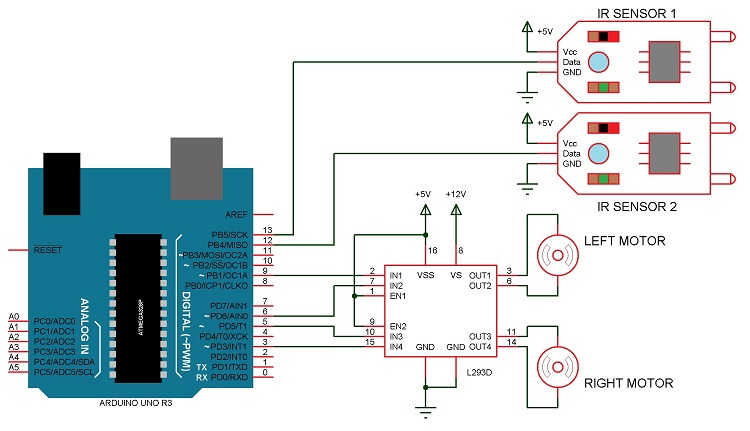
Circuit Diagram
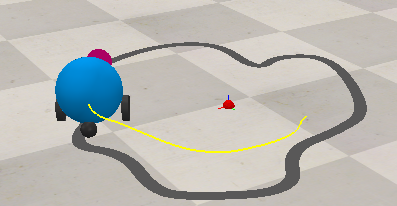
Simulation of the project
We use very well-known software CoppeliaSim to simulate our project and see how it works. We use python code to simulate the robot to do its task.
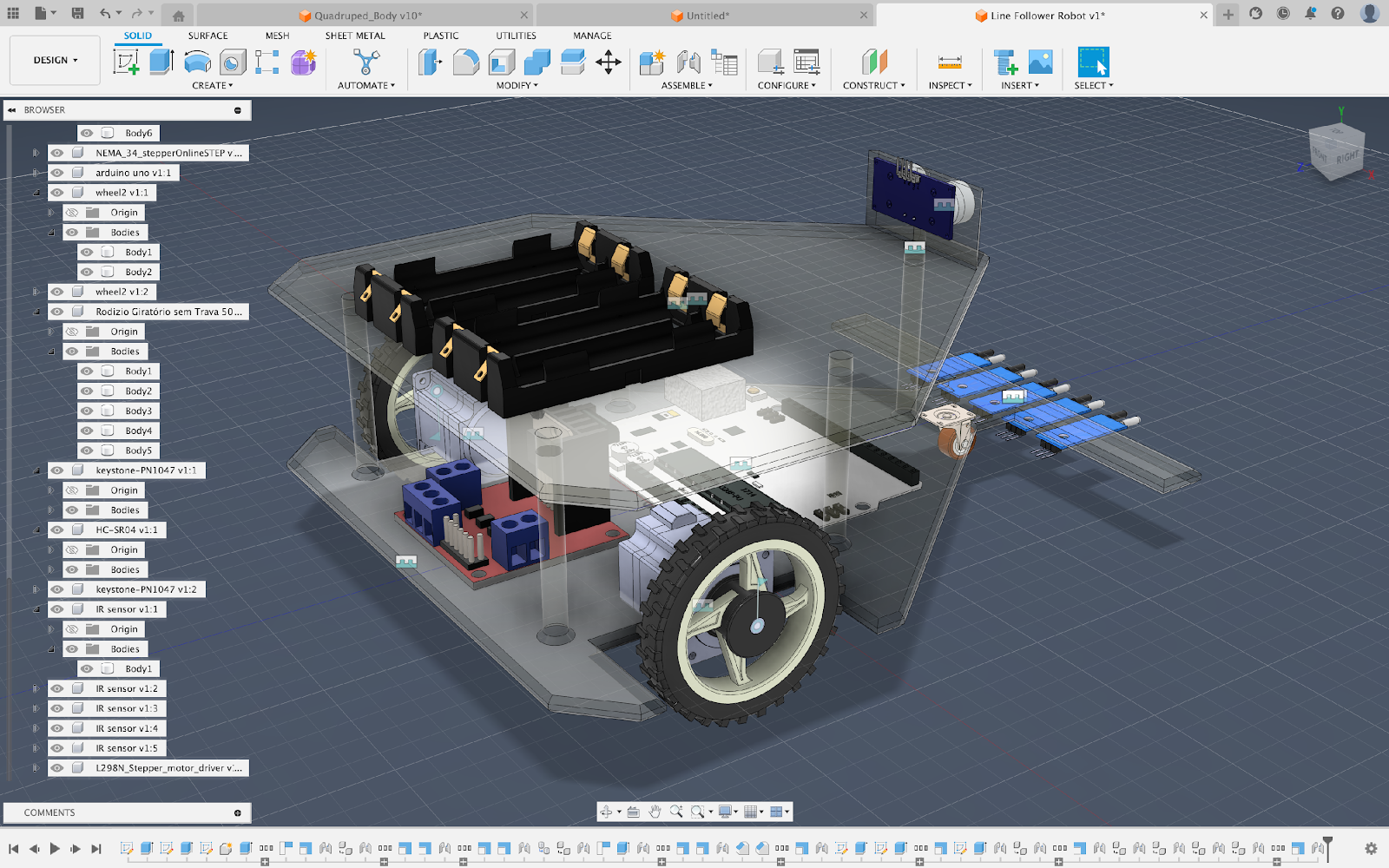
This page presents the 3D model of our line follower and obstacle avoiding robot designed and created using Autodesk Fusion 360.
The model contains Ultrasonic and IR sensors for obstacle and line detection respectively, a Motor Driver 298N for controlling the stepper motors with the help of a Microcontroller (Arduino UNO).
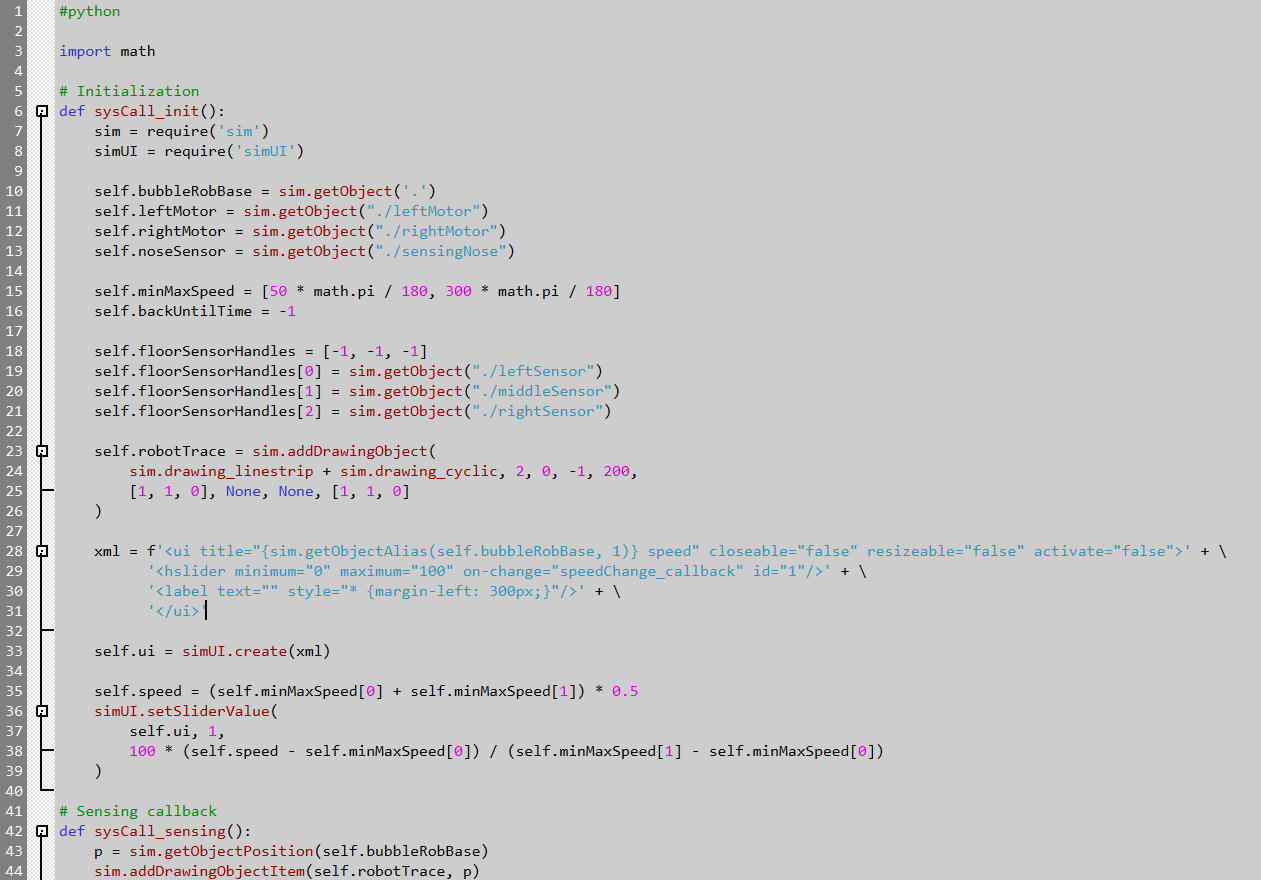
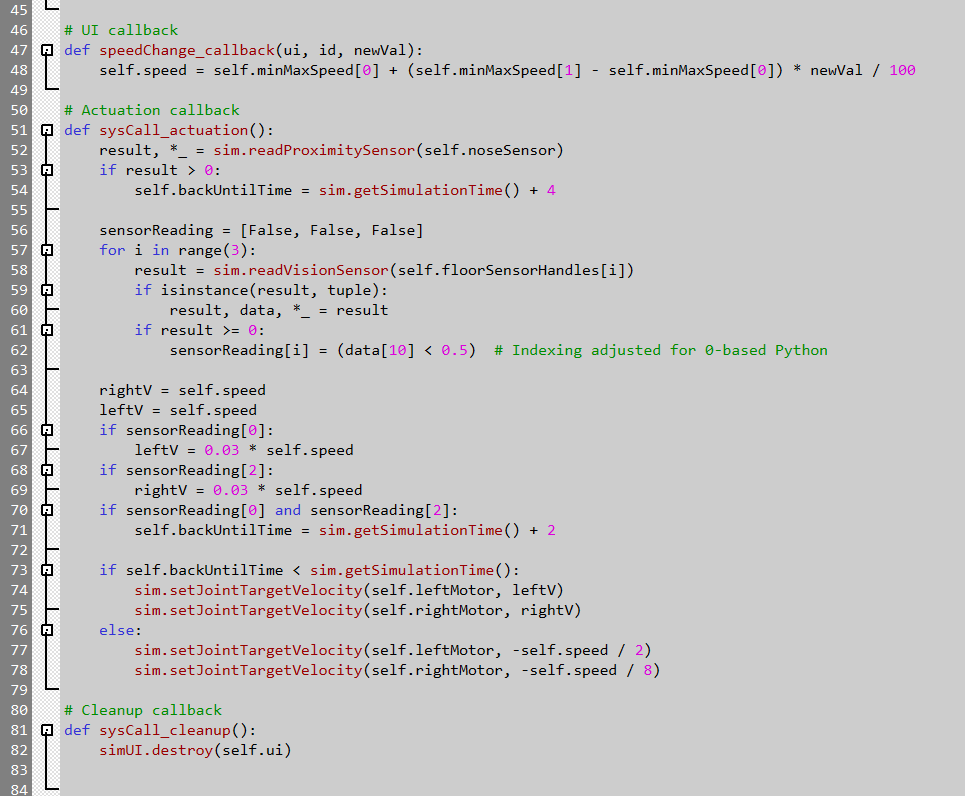
Code used in the project
Conclusion
In this project we learnt how an Arduino works and how we can use it with other control algorithms like PID to make an effective Line Follower Robot. We also simulated it on CoppeliaSim software and experienced how it would work.
References
- Arduino UNO driven PID Line Follower (engineersgarage.com)
- Arduino Line Follower Robot (electronicshub.org)
- Line following BubbleRob tutorial (coppeliarobotics.com)
MENTORS
- Anurag Kumar (221ME305)
- Priyansh Joshi (221EE265)
- Piyanshu Sharma (221ME149)
MENTEES
- Aditi Sinha (231EC205)
- Santo Devis Komban (231ME347)
- Admit Deshmukh (231EE108)
- Purav Nayak (231EC143)
MEET LINK- http://meet.google.com/pxi-oyth-vjs
Report Information
Report Details
Created: May 9, 2024, 5:13 p.m.
Approved by: Aditya Pandia [CompSoc]
Approval date: None
Report Details
Created: May 9, 2024, 5:13 p.m.
Approved by: Aditya Pandia [CompSoc]
Approval date: None