
Multi-Tool Rotatable Arm
Abstract
Abstract
Multi-Tool Rotatable Arm
1. Introduction
- In various industries, the necessity for specialized tools such as drill machines and screwdrivers is paramount, with each meticulously crafted to fulfill specific tasks. However, conventional fixed tools often encounter constraints when faced with confined spaces or irregular surfaces, thus impeding operational efficiency. Addressing these challenges, our project developed a 360-degree flexible robotic arm manipulator. This innovative tool, mountable and operational in horizontal, vertical, or upside-down positions, integrates rotating hinges, connectors, a motor mount, and robust support structures to excel in accessing intricate and hard-to-reach areas. Its adaptability extends beyond drilling, offering precise and efficient operations, thereby enhancing overall effectiveness in diverse industrial settings.
2. Methodology
- Develop a code to facilitate precise navigation to a specified point in space.
- Ensure seamless movement from Point A to Point B as part of the coding process.
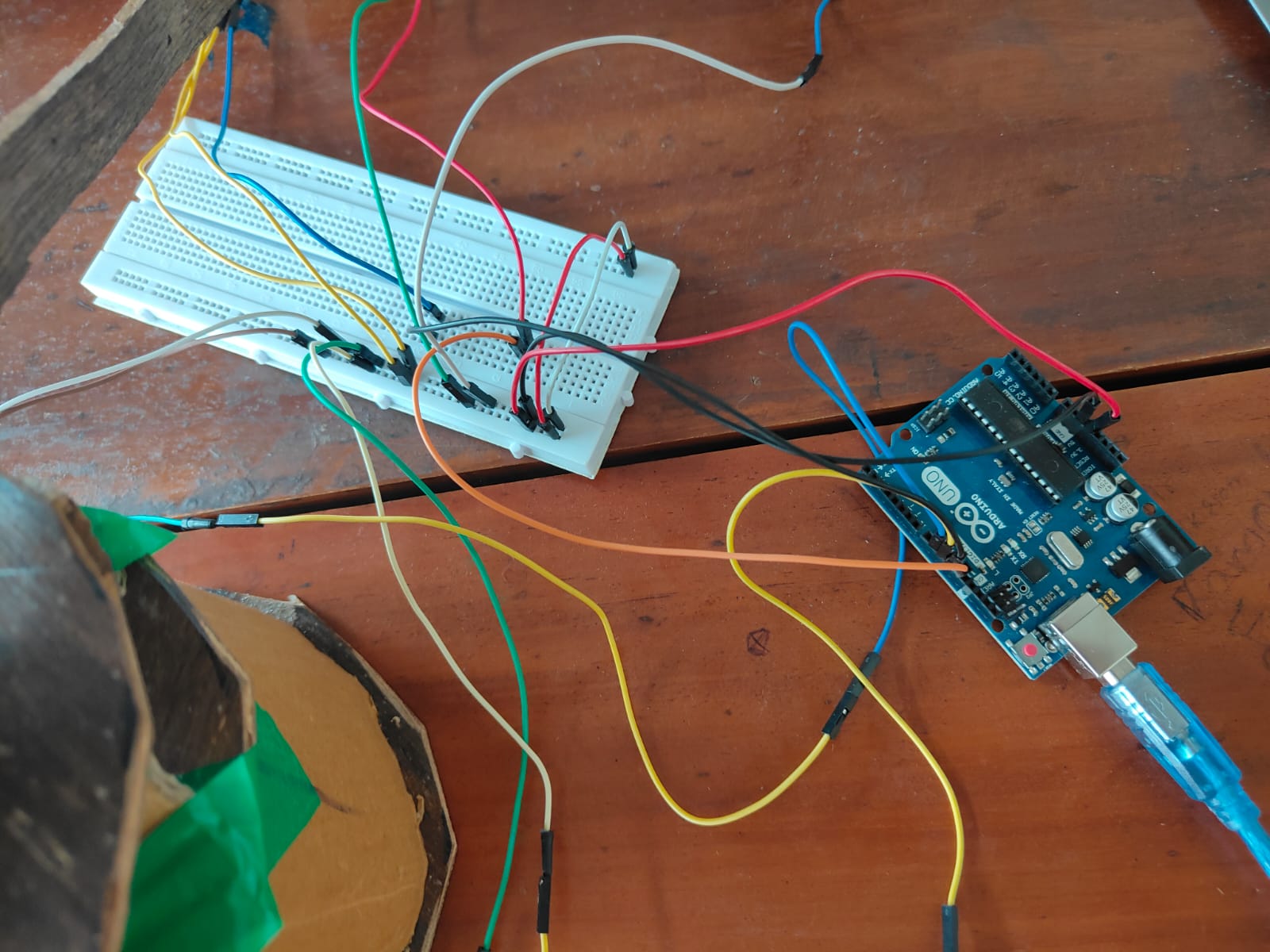
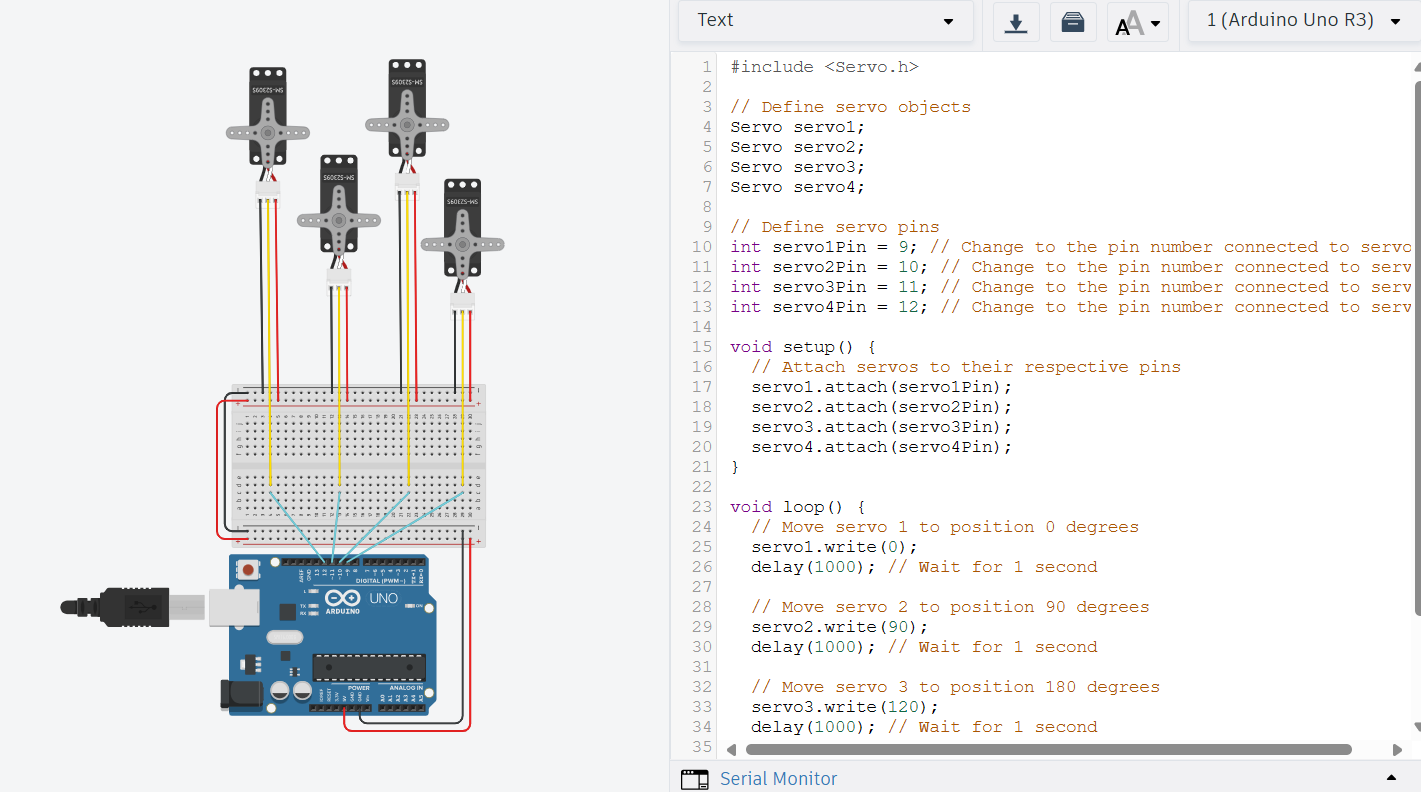
- Establish connections between Arduino and servo motors to enable coordinated actions.
- Utilize Tinkercad to verify the integrity of Arduino connections, checking voltages for accuracy.
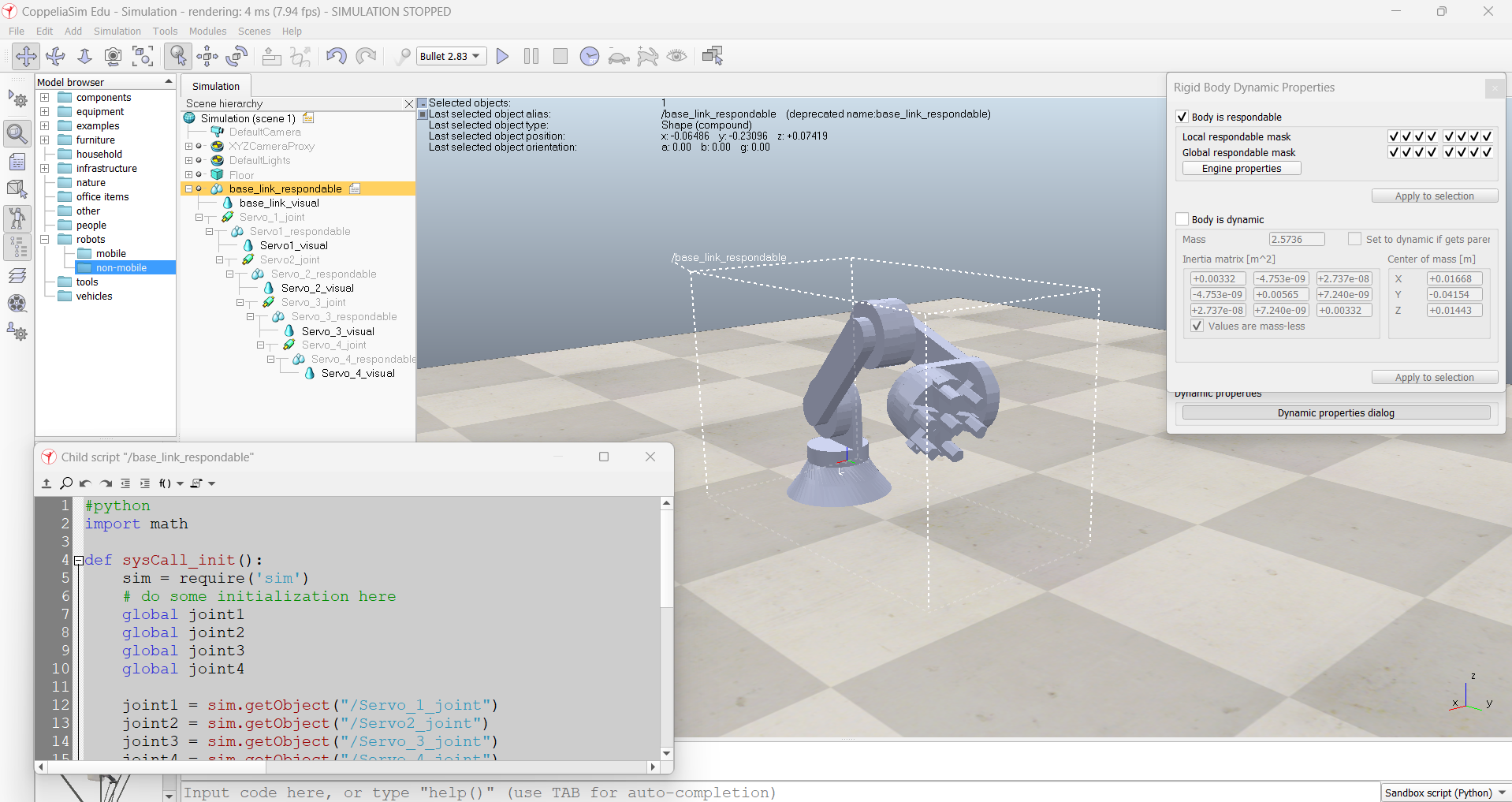
- Assess Arduino functionality in simulation environments, employing platforms like Tinkercad or Gazebo to ensure compatibility and optimal performance.
3. Results
-
After running simulations in CoppeliaSim, we noticed that our expected outcomes didn't quite match reality.
-
As we transitioned to the physical modeling phase, we faced some unexpected challenges, particularly with the weight of certain components. It was frustrating to encounter this hurdle, but it also presented us with an opportunity to think creatively and problem-solve.
-
Through a series of trial and error, we experimented with different approaches to address the weight issue. Eventually, we found success by refining our design and reducing the number of Degrees of Freedom (DOF). This adjustment not only lightened the load but also significantly improved the functionality of our system.
4. Discussion
- Interpretation of the results: The analysis of our project outcomes reveals an intriguing narrative. While initial simulations in CoppeliaSim did not align with our expectations, the subsequent physical modeling phase unveiled promising prospects. Despite encountering hurdles associated with component weight, our iterative refinement efforts yielded noteworthy improvements. Through a strategic reduction in Degrees of Freedom (DOF), we achieved enhanced functionality without sacrificing performance integrity. Additionally, it's noteworthy that the initial DOF also operated efficiently at higher servo RPMs, underscoring the project's adaptability and performance optimization.
- Comparison with initial objectives: A critical aspect of our discourse involves juxtaposing our achieved results with the initial objectives delineated at project initiation. By assessing the degree of alignment between our envisioned goals and actual accomplishments, we gain valuable insights into the efficacy of our approach. This comparative analysis offers a holistic perspective on our project trajectory, highlighting areas of success, deviation, and potential avenues for future exploration.
- Addressing encountered challenges: Throughout the project lifecycle, we navigated through a spectrum of challenges that tested our mettle and ingenuity. From technical intricacies to logistical constraints and team dynamics, each obstacle presented unique complexities. In this segment, we delve into a comprehensive exploration of the specific challenges confronted and elaborate on the strategic methodologies employed to overcome them. By sharing our experiences and insights gained, we aim to foster a deeper understanding of the project's intricacies and contribute to collective knowledge within our domain.
5. Project Pictures
- Simulation:
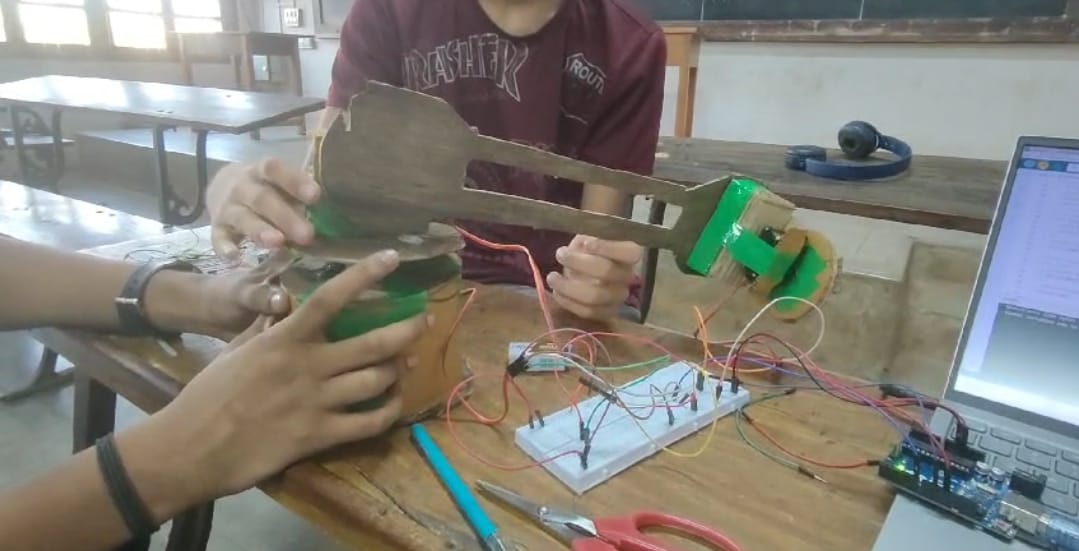
- Arduino connections:
- Manufactured Parts:

- 4 DOF Physical Model:

- 3 DOF Physial Model:
6. Conclusion
- In conclusion, our project introduces a 360-degree flexible robotic arm manipulator, addressing key challenges in industrial settings. With its adaptability and precision, this innovative tool offers efficient solutions for accessing intricate spaces. Our project highlights the importance of continuous innovation in enhancing operational workflows and meeting industry demands.
7. References
- https://nevonprojects.com/360-degree-flexible-drilling-machine/
- https://www.makerguides.com/servo-arduino-tutorial/#Hardware_components
- https://www.researchgate.net/publication/279201859_Kinematics_Modeling_of_a_4-DOF_Robotic_Arm
- https://youtube.com/playlist?list=PL1YrgW7ROFofBqPGiWAmTqIwDc5SrzZrA&si=1jeqMghbGRAiiKwA
- https://youtu.be/7vEvNscaB9M?si=KFDFPaVqonneqGdd
Mentors:
- Pranav Sudheer
- Manas Thakur
- Yash
Mentees:
- Rohit L
- Anagha
- Debarghya Banerjee
- Vinay Kotwani
Meeting Link:
https://meet.google.com/hki-uinq-quf
Report Information
Report Details
Created: May 5, 2024, 6:19 p.m.
Approved by: Nikesh Shetty [Piston]
Approval date: May 10, 2024, 8:07 a.m.
Report Details
Created: May 5, 2024, 6:19 p.m.
Approved by: Nikesh Shetty [Piston]
Approval date: May 10, 2024, 8:07 a.m.