
Design and Analysis Of Regenerative Braking System using Simulink
Abstract
Abstract
Design and Analysis Of RBS using Simulink
-
Join meet for detailed explanation or doubts : To join the video meeting, click this link: https://meet.google.com/fiz-pzhz-hue
Otherwise, to join by phone, dial +1 315-599-0308 and enter this PIN: 461 034 456#
Mentors:
Rahul Sohan Gupta
Department of Mechanical Engineering
National Institute of Technology
Surathkal, Karnataka - 575025
Email: rahulgupta.221me244@nitk.edu.in
Revuri Sai Datta Praneeth
Department of Mechanical Engineering
National Institute of Technology
Surathkal, Karnataka - 575025
Email: rsdp.221me343@nitk.edu.in
Dharmesh Raikwar
Department of Mechanical Engineering
National Institute of Technology
Surathkal, Karnataka - 575025
Email: dharmeshraikwar.221me117@nitk.edu.in
I. INTRODUCTION
- Regenerative braking systems have emerged as a pivotal technology in enhancing energy efficiency and sustainability in the automotive industry.This project aims to conduct a comprehensive study and design regenerative braking systems to contribute to the advancement of ecofriendly transportation solutions.The research will focus on understanding the principles, designing efficient systems and analysing performance parameters. Regenerative braking refers to an innovative energy transformation and recovery mechanism which slows down a moving object or vehicle rapidly by transmitting the kinetic energy into a specific form of energy that can be used right away or later when required. This method or mechanism is entirely different from the conventional braking system. In the “regenerative braking system” (RBS), an electric motor (traction motor) is usually utilised in vehicles to convert the momentum or kinetic energy and recover other forms of energy rather than losing it at the brake disc as heat. In addition, the regenerative brakes help in improving the efficiency of the vehicle and extend the lifespan of the braking system, as the mechanical parts of regenerative brakes do not wear out rapidly.
- Regenerative brakes are mostly involved in electric motors that function as electric generators. In other words, the “regenerative braking mechanism” is highly effective in the conversion of an electric motor into an electric generator by generating and reserving energy from the momentum of the moving vehicles. The energy that is converted and stored from the “regenerative braking system” (RBS) is used in electric and hybrid cars and railways. For instance, the electricity recovered from the “regenerative braking system” is stored back into the “traction power supply” for future uses. On the other hand, in electric and hybrid vehicles, the regenerated energy generated through RBS is stored in the battery in chemical form, in the capacitor bank in electrical form, and in the rotating flywheel in mechanical form.
- The mechanism of regenerative braking is mostly observed in fully electric and hybrid vehicles. It has been observed that the specific mechanism helps in converting the kinetic energy of the vehicle into the form of heat energy and then electrical energy rather than losing it, such as in the “conventional braking system” (CBS). This converted electrical energy through the RBS is utilised in charging the high-voltage batteries of completely electric or hybrid vehicles. In the conventional braking system (CBS), cars or moving object slows down due to the result of friction generated between the rotors and brake pads. However, CBS is not effective at all when it comes to the matter of converting and storing the kinetic energy of vehicles before applying the brake. Approximately, 100% of the kinetic energy of vehicles that propels a moving vehicle in the forward direction is lost in the form of heat energy while the CBS is applied; thus, a lot of energy is wasted here instead of storing or transforming into usable forms. Contradictorily, the RBS mechanism solves the issue of losing kinetic energy while applying brakes in moving vehicles. Generally, the RBS mechanism is consistent in converting around 70% of the kinetic energy of moving vehicles into other forms of energy that can be used immediately or later when needed.
- The performance of the regenerative braking can be enhanced by using advanced technology-based power components such as ultra-capacitor. Many researchers suggest that the “regenerative braking mechanism: is highly effective, especially in electric vehicles, and even includes a greater future scope. Eventually, the price of diesel and petrol has drastically enhanced across the globe while governments of multiple countries encourage countrymen to purchase electric or hybrid cars by giving subsidies and discounts to promote environment-friendly practices and reduce air pollution
II. LITERATURE REVIEW
A. Mechanism of regenerative braking system :
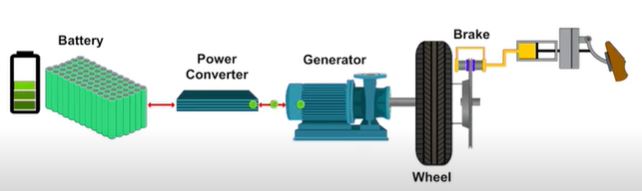
It has been identified that the RBS is widely used in hybrid vehicles (HV) and electric vehicles (EV). Therefore, this chapter is going to mainly focus on the use of regenerative brakes in EVs and electric hybrid vehicles to understand the general concept of the RBS. Regenerative braking generates electric energy from kinetic energy by reversing the procedure that forces a car to move forward. In electric vehicles, a battery pack is used to provide power to the motor or multiple motors to generate torque so that vehicles can move forward by using rotational force on wheels. Regenerative brakes turns the kinetic energy into electric energy at first and then mechanical energy that ensures the spin of wheel and axles. The RBS utilises the energy of spinning wheels to reverse the direction of generating electricity, such as to the direction of the battery from the electric motor or motors. In this context, drivers need to apply pressure on the brake pedal or remove the foot from the accelerator pedal to activate the RBS. Thus, the electric motor in the RBS turns into an electric generator to store energy rather than wasting all kinetic energy as heat. RBS also assists in slowing down vehicles as wheels commute energy to rotate the electric motor’s shaft.
As per the studies, when a motor runs due to external forces, it is defined as an electric generator. This fundamental concept has been applied in the “regenerative braking system”. In this context, a flywheel is utilised in the RBS to reverse the direction of energy generation in terms of turning an electric motor into an electric generator. As per the studies a “regenerative braking system” reduces fuel consumption by approximately 33% by converting kinetic energy into electric and mechanical energy. The utilisation of a single gear and direct drive transaxle in the RBS can maximise the efficiency of regenerative braking. Similarly, the engine needs to be disengaged with the drive wheels of vehicles while applying the regenerative brakes to eliminate ther energy loss due to engine friction. Furthermore, reducing the operation time of brakes can expand the life span of the brakes. Thus, the efficiency of RBS also reduces the maintenance and repair costs by reducing the application time to slow down moving vehicles. It has been recognised that the RBS increase the driving range up to 11-22% based on the RBS parameters and “drive cycle settings” such as energy consumption.
B. Advantages Of RBS :
- The increased life span of rotors and brake pads:
Regenerative brakes are efficient, providing adequate stopping force to moving wheels and axles. As regenerative brakes are mostly worked while slowing down vehicles thus, the braked pads, as well as rotors, are used with a low frequency (Jafari Kaleybar et al. 2023). As a result, the brake pads and rotors last longer between servicing and thus, the maintenance cost of car owners reduces. However, a routine check-up according to the guidelines of a manufacturing company is required even after having an enhanced lifespan of brake pads due to the RBS. - High fuel efficiency:
It has been noticed that hybrid vehicles still use ICE (“internal combustion engines”) to utilise electric motors mostly to generate energy. On the contrary, the “regenerative braking” mechanism is efficient in keeping the battery pack of electric vehicles charged in terms so that drivers can drive smoothly without relying on engines (Mitropoulos-Rundus et al. 2021. Moreover, the RBS helps in reducing fuel consumption and thus saves money. -
Extended driving range for electric vehicles (EVs):
The mechanism of capturing the kinetic energy and sending it back to the battery pack of EVs as electric energy can comprehensively enhance the driving range of vehicles. According to scientific estimation, the RBS can potentially extend the driving range of EVs up to hundreds of miles in a year. It not only enhances the driving range of EVS or hybrid cars but also reduces the charging time as well.
C. Limitations of RBS:
- Less stopping power:
Regenerative braking usually has the potential to gradually slow down and stop moving vehicles. However, it may be required much force on the brake pad to stop the vehicles compared to conventional or hydraulic braking systems. In most cases, drivers require to press the brake harder to stop the vehicle to get the same effectiveness as CBS. - Reduced efficiency at the lower velocity:
In the RBS, the kinetic energy and barking energy convert into electric energy that stores in a battery pack of EVs. However, driving at low speed refers to low kinetic energy and the requirement of low braking energy (Kivanc and Ustun, 2021). Thus, low the value of regenerative energy will be lower as well; hence, driving at low speed will not be much effective in the RBS.
III. METHODOLOGY
Theory:
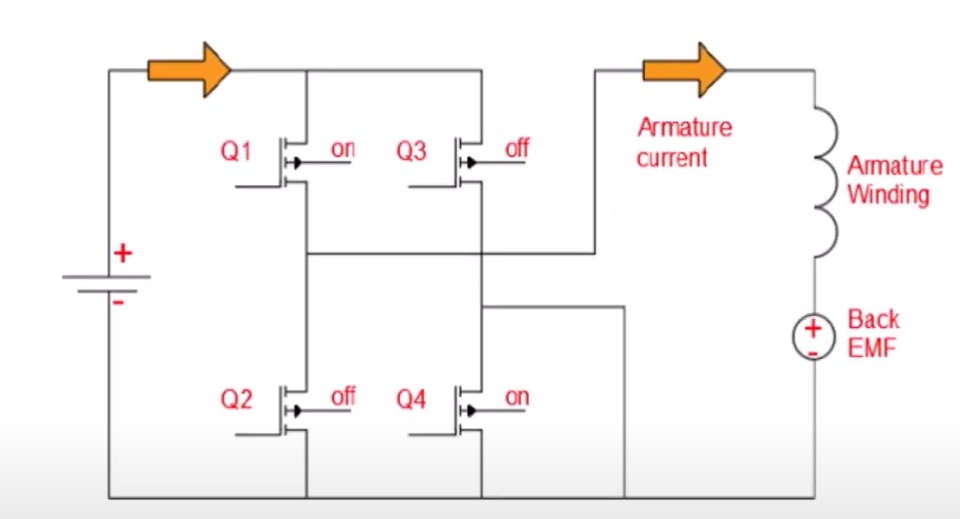
Consider a simple circuit with four switches. The battery and the combination of armature winding and backemf are the machine. The circuit comprises switches Q1, Q2, Q3, and Q4, which are power electronic switches. During driving mode, Q1 and Q4 are on, allowing current flow from the battery through the machine. During regenerative braking, when the brakes are applied, the switches change states, causing the machine to become a higher energy state, leading to the battery being charged.
Parameters:
To simulate this, we need four switches, a battery, a machine, a resistor, and a capacitor. The machine chosen is a 5 HP machine with specific parameters. The battery chosen is a lithium-ion battery with an initial state of charge set to 50%.
Step Sign:
For inputs, a step signal is used. Negative values represent braking mode, while positive values represent acceleration mode.
Pulse Generator:
Pulse signals are generated to control the switches. The duty cycle and frequency are adjusted to simulate realistic switching behavior.
Simulation:
The simulation is run for six seconds. The battery is observed to charge and discharge based on the input signal.
IV. SIMULINK MODEL:
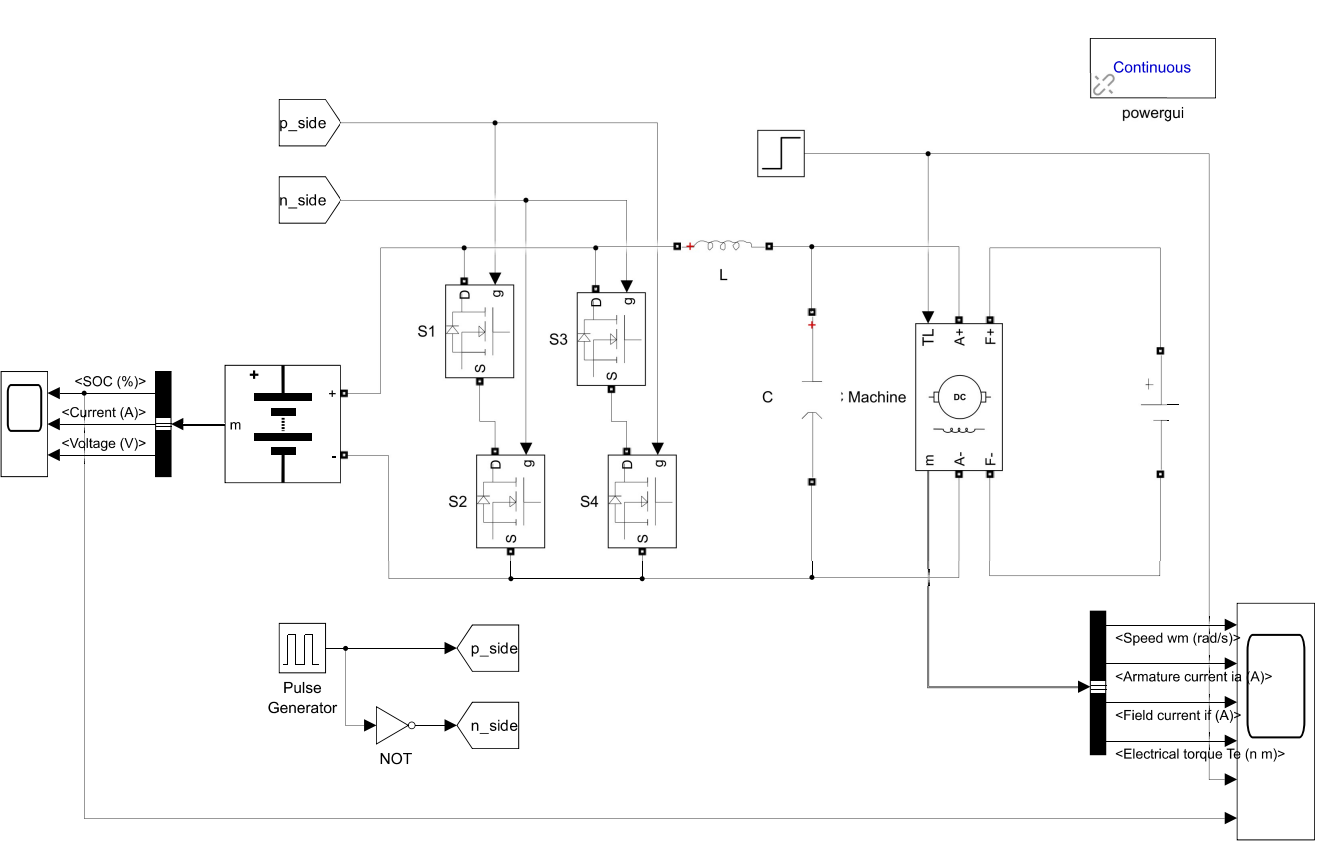
-
Capacitance and Inductance:
- Capacitance: Chosen value of 150 microfarads (μF), determining the capacitor's ability to store electrical charge.
- Inductance: Value of 5 millihenries (mH), indicating the inductor's ability to resist changes in current flow.
-
Input Signal (Low Torque):
- Starting Value: The input signal starts at -20, suggesting an initial state conducive to regenerative braking (negative value).
- Transition at 7 Seconds: The input signal transitions from -20 to 10 at exactly 7 seconds. This shift likely signifies the transition from braking mode to acceleration mode.
-
Machine Specifications:
- Model: Preset model one, representing a 5 HP machine.
- Voltage: Operating at 240 volts.
- Speed: Operating at 1,750 RPM (revolutions per minute), indicating the rotational speed of the machine.
- Excitation: Field winding requires 300 volts DC for excitation.
V. OUTPUT ANALYSIS:
-
Battery State of Charge (SOC): The battery SOC represents the percentage of charge remaining in the battery. During the simulation, the SOC varies based on the charging and discharging cycles induced by the regenerative braking system. When the vehicle decelerates and regenerative braking occurs, the battery SOC increases as it receives energy from the machine. Conversely, during acceleration, the battery discharges, causing the SOC to decrease.
-
Armature Current and Field Current: These parameters represent the electrical currents flowing through the machine's armature winding and field winding, respectively. During regenerative braking, the machine operates in generator mode, producing electrical current that flows back into the battery. The armature current reflects this flow of current from the machine to the battery, while the field current remains relatively constant, governing the machine's operation.
-
Electrical Torque: Electrical torque signifies the rotational force exerted by the machine's electrical components. In regenerative braking, the machine generates torque in the opposite direction of motion to facilitate energy conversion. This electrical torque contributes to the deceleration of the vehicle and the generation of electrical energy for battery charging.
-
Machine Speed: The speed of the machine, typically measured in radians per second (rad/s), provides insights into its rotational dynamics. During regenerative braking, the machine's speed decreases as it converts kinetic energy into electrical energy. This decrease in speed correlates with the vehicle's deceleration and the effectiveness of regenerative braking in recovering energy.

VI. CONCLUSION
In conclusion, the simulation of the regenerative braking system using MATLAB/Simulink has yielded promising results, indicative of its effectiveness in recovering energy during vehicle deceleration. Through meticulous parameter selection and precise modeling, we have demonstrated the system's ability to seamlessly transition between acceleration and braking modes, efficiently harnessing kinetic energy for battery charging. The comprehensive analysis of key performance metrics, including battery state of charge, armature and field currents, electrical torque, machine speed, and energy flows, has provided valuable insights into the system's behavior. These results showcase the system's capacity to optimize energy utilization and enhance overall vehicle efficiency.
Furthermore, the successful integration of the simulated regenerative braking system underscores its potential for real-world application in electric vehicles, contributing to sustainable transportation solutions and reducing environmental impact. The findings of this study lay a solid foundation for further research, development, and optimization of regenerative braking technology in pursuit of greener and more energy-efficient mobility solutions. In light of the positive outcomes achieved in this study, it is evident that regenerative braking systems hold immense promise for revolutionizing the automotive industry and fostering a cleaner, more sustainable future.
As we move forward, continued exploration and refinement of regenerative braking technology will be instrumental in realizing its full potential and driving the transition towards a greener, more sustainable transportation ecosystem.
Vll. REFERENCES
- https://ieeexplore.ieee.org/document/8028032
- https://ieeexplore.ieee.org/document/8392101
- https://ieeexplore.ieee.org/document/9987244
- https://www.mdpi.com/2076-3417/10/5/1789
- https://www.researchgate.net/publication/373448421_Design_Analysis_of_Regenerative_Braking_System
VlII. ACKNOWLEDGEMENT
As executive members of IEEE NITK, we are extremely grateful for the opportunity to learn and work on this project under the prestigious name of IEEE NITK Student Chapter. We would like to extend our heartfelt thanks to IEEE for providing us with the necessary funds to complete this project successfully.
Report Information
Report Details
Created: May 5, 2024, 1:38 p.m.
Approved by: Nikesh Shetty [Piston]
Approval date: May 10, 2024, 7:29 a.m.
Report Details
Created: May 5, 2024, 1:38 p.m.
Approved by: Nikesh Shetty [Piston]
Approval date: May 10, 2024, 7:29 a.m.